Исследователи Университета Окаяма в сотрудничестве с промышленными партнерами разработали инновационного подводного робота, который включает технологию трехмерного распознавания объектов для автономного исследования в глубинах морей и озер.
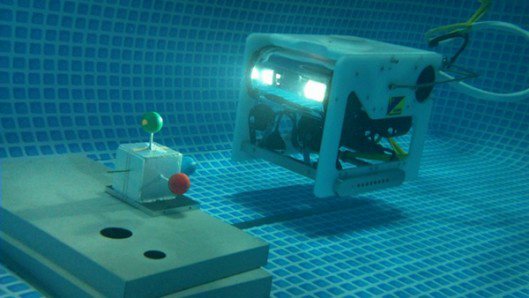
Система Move-on-Sensing (MOS) этого автономного подводного аппарата (AUV) сочетает в себе 3D стереоскопическое компьютерное зрение с традиционной технологией гидролокатора. Такая комбинация позволяет ему искать, отслеживать и определять подводные объекты с точностью до 5 мм, хотя исследователи надеятся уменьшить эту цифру до 0,5 мм.
В конечном итоге AUV может быть использован для таких операций, как удаление радиоактивных материалов с подводных мест, разведка полезных ископаемых, ведение телекоммуникационных кабелей и мониторинг окружающей среды.