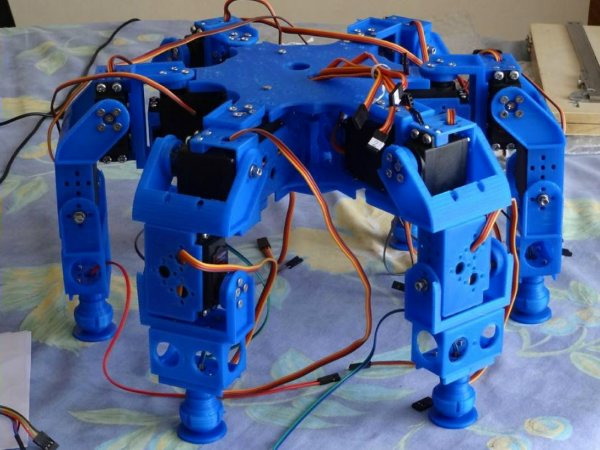
Инженер-сварщик из Франции Филипп Лека разработал робота, перемещающегося на 6 ногах (подобно насекомым), в центре вычислительной системы которого – компьютер-плата Arduino, а детали корпуса и конечностей распечатаны на 3D-принтере.
О своём опыте Лека рассказывает охотно. Первый раз он узнал о 3D-печати в Технологическом университете Нима, в мастерской которого проходил тематический семинар. Впечатлённый новым методом, Филипп узнал о 3D-печати больше с помощью Интернета и вскоре решил самостоятельно создавать что-то. Первой его мыслью стал робот.
С электронной частью Филиппу также пришлось знакомиться самостоятельно. Изучив возможности платы Arduino, он решил сам создать программную часть для робота, основанного на ней. Купив стартовый набор Uno R3 со скромным набором чипов и датчиков, он докупил необходимое и настроил систему сам, осваивая её возможности в процессе.
Идею сделать робота паукообразным (несмотря на шесть, а не восемь ног) инженер выработал во время бесед с дочками. Они же придумали роботу, созданному отцом, и имя Жильбер.
Робот-паук появился в нынешнем виде не сразу. Первый прототип (Жильбер-100) имел корпус из 2-миллиметровой алюминиевой пластины, а управлялся проводным контроллером от PlayStation 2, с кнопками и джойстиком.
Вторая версия была несколько более продвинутая. «Жильбер-200» также был «одет» в алюминий, но в его конструкции использовались детали из двух робототехнических наборов производства Китая, которые Лека купил на eBay. Теперь робот имел более продвинутые сенсоры, которые обеспечили ему лучшее распознавание обстановкию Встроенная камера могла подключаться к сетям Wi-Fi и передавать изображение.
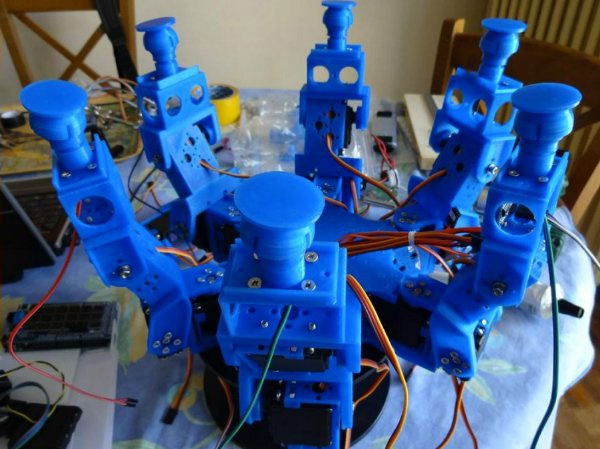
Самый совершенный вариант на сегодня – «Жильбер-300» – облачён уже не в металл, а в пластик PLA, а детали корпуса его создатель распечатал на 3D-принтере. Электронная часть этого поколения также усовершенствована. У робота есть ряд датчиков, позволяющих ему определять своё положение в пространстве и сканировать обстановку. Для управления и программирования робота-паучка на его корпусе есть сенсорный дисплей.
На проектирование корпуса у Филиппа Лека ушло три дня, которые он посвятил работе в программе OpenSCAD. Порядка месяца ушло на печать пластиковых элементов. На сборку корпуса и электронных частей Филипп потратил ещё несколько дней.
На сегодня робот умеет перемещаться во всех направлениях, поворачивать на ходу, вращаться вокруг своей оси на 360°, оставляя ноги в покое, и регулировать положение видеокамеры. В новое поколение Филипп Лека планирует добавить и новые возможности. Акселерометр позволит роботу распознавать момент касания ноги к земле, что научит робота ходить по неровной местности, сохраняя равновесие, и находить на локациях со сложным ландшафтом оптимальный маршрут.